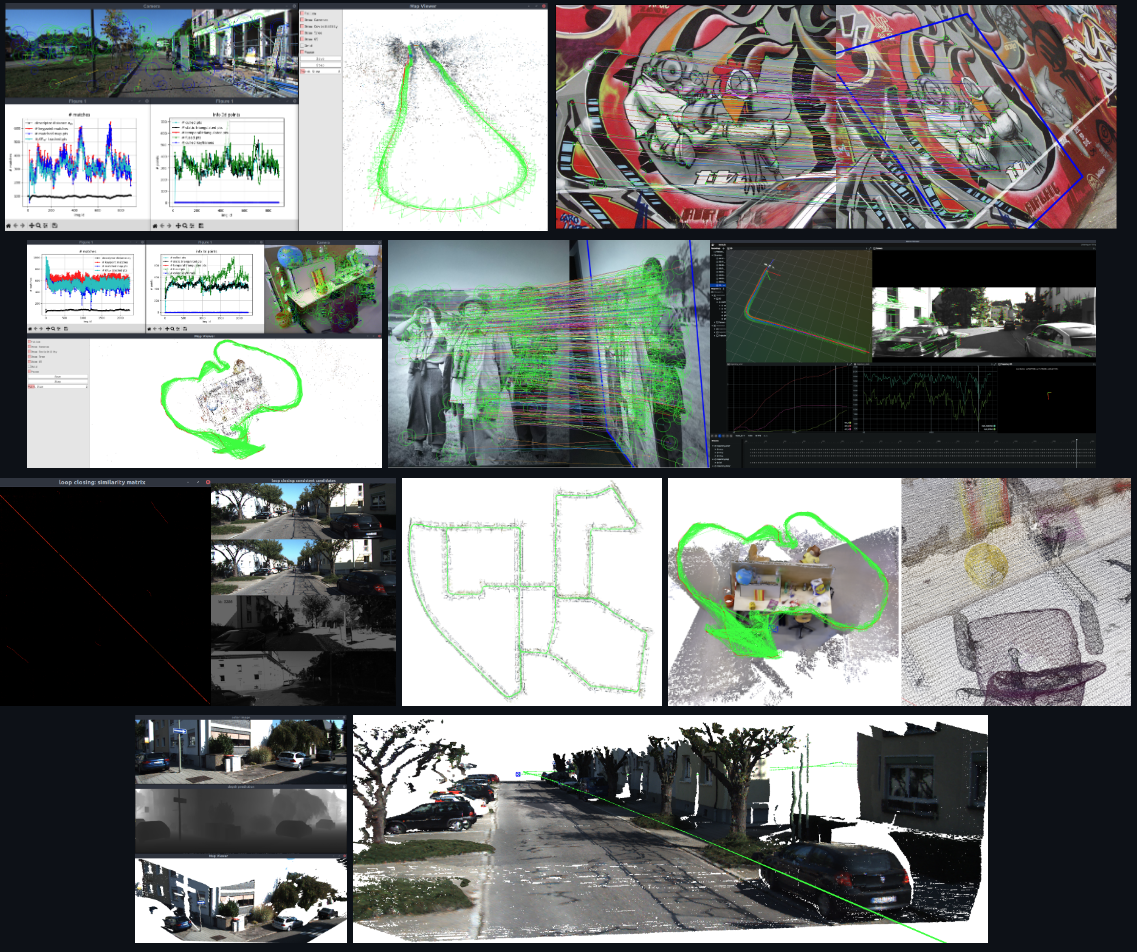
A new release of pySLAM is here. Loop-closing, volumetric integration, depth prediction and more improvements.
🎉 pySLAM v2.2.5 is here!
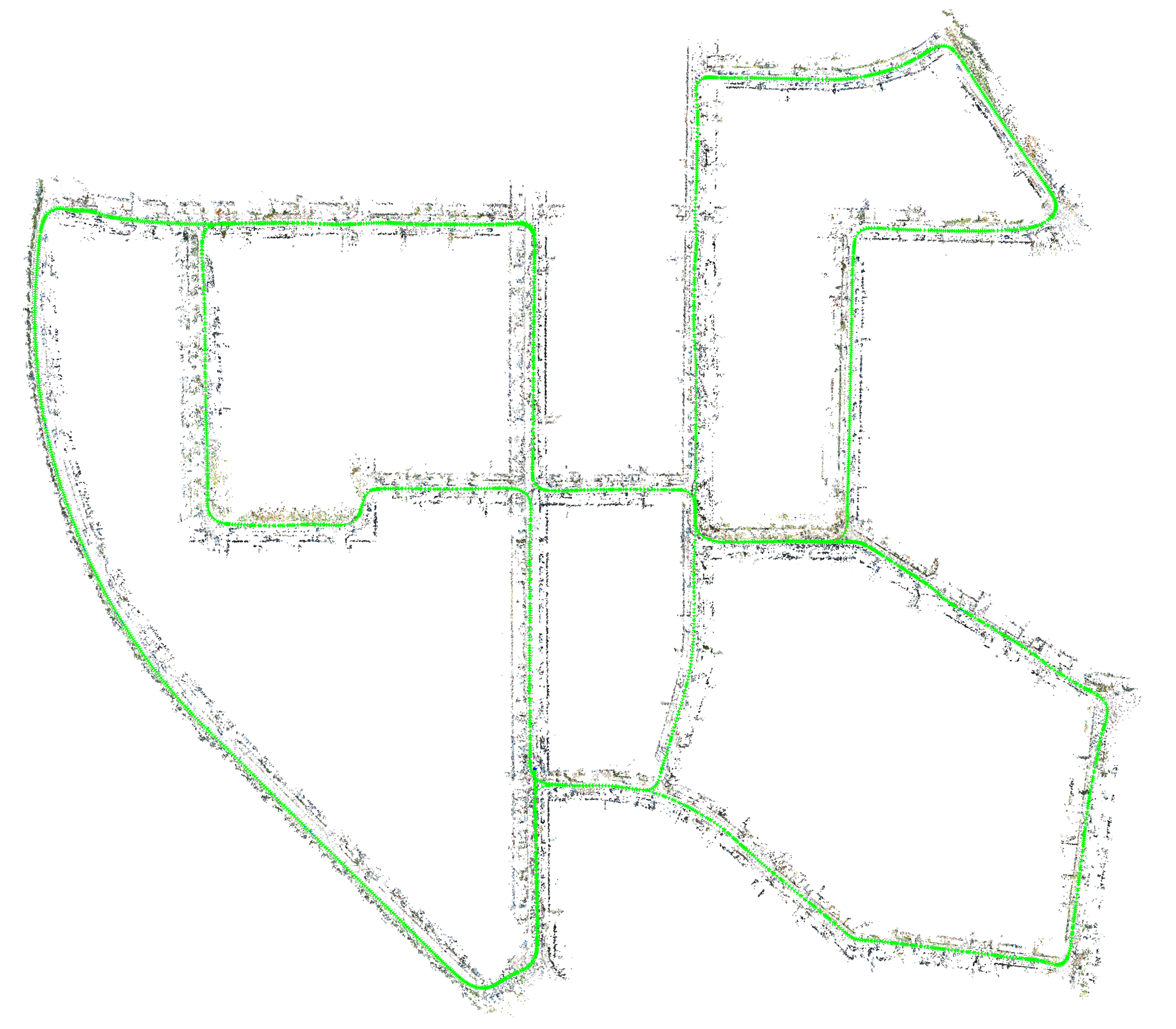
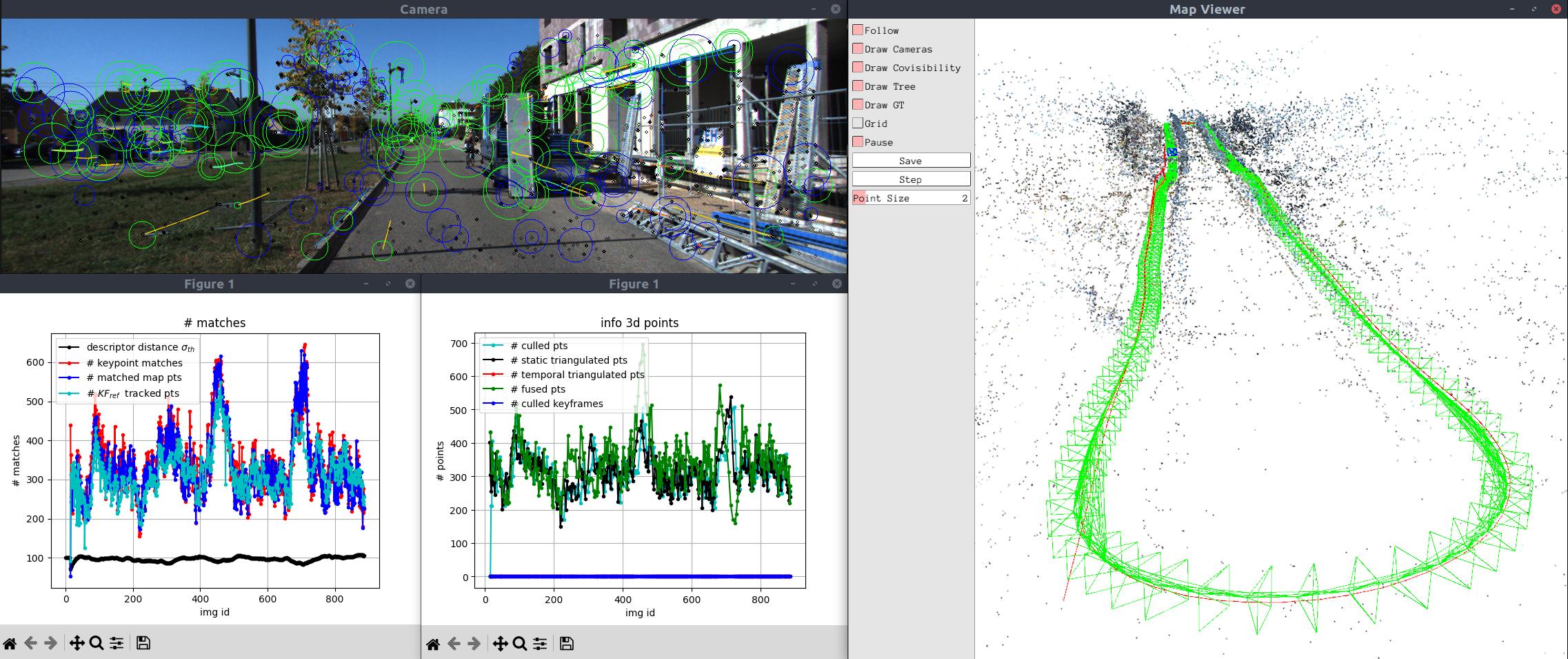
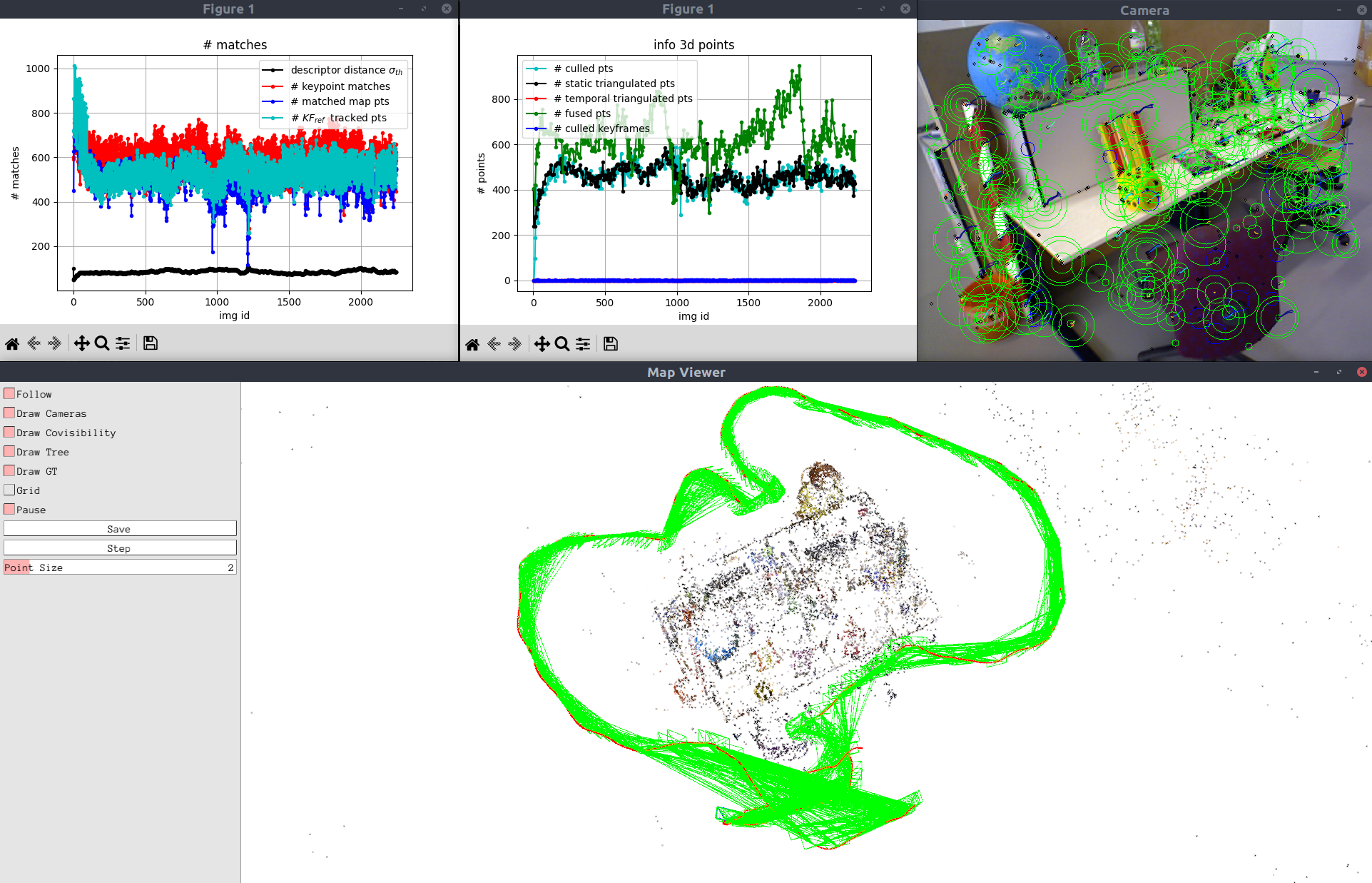
This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
✅ A wide range of classical and modern local features.
✅ Advanced loop closing methods with descriptor aggregators like Visual Bag of Words (BoW, iBoW), Vector of Locally Aggregated Descriptors (VLAD), and modern global descriptors.
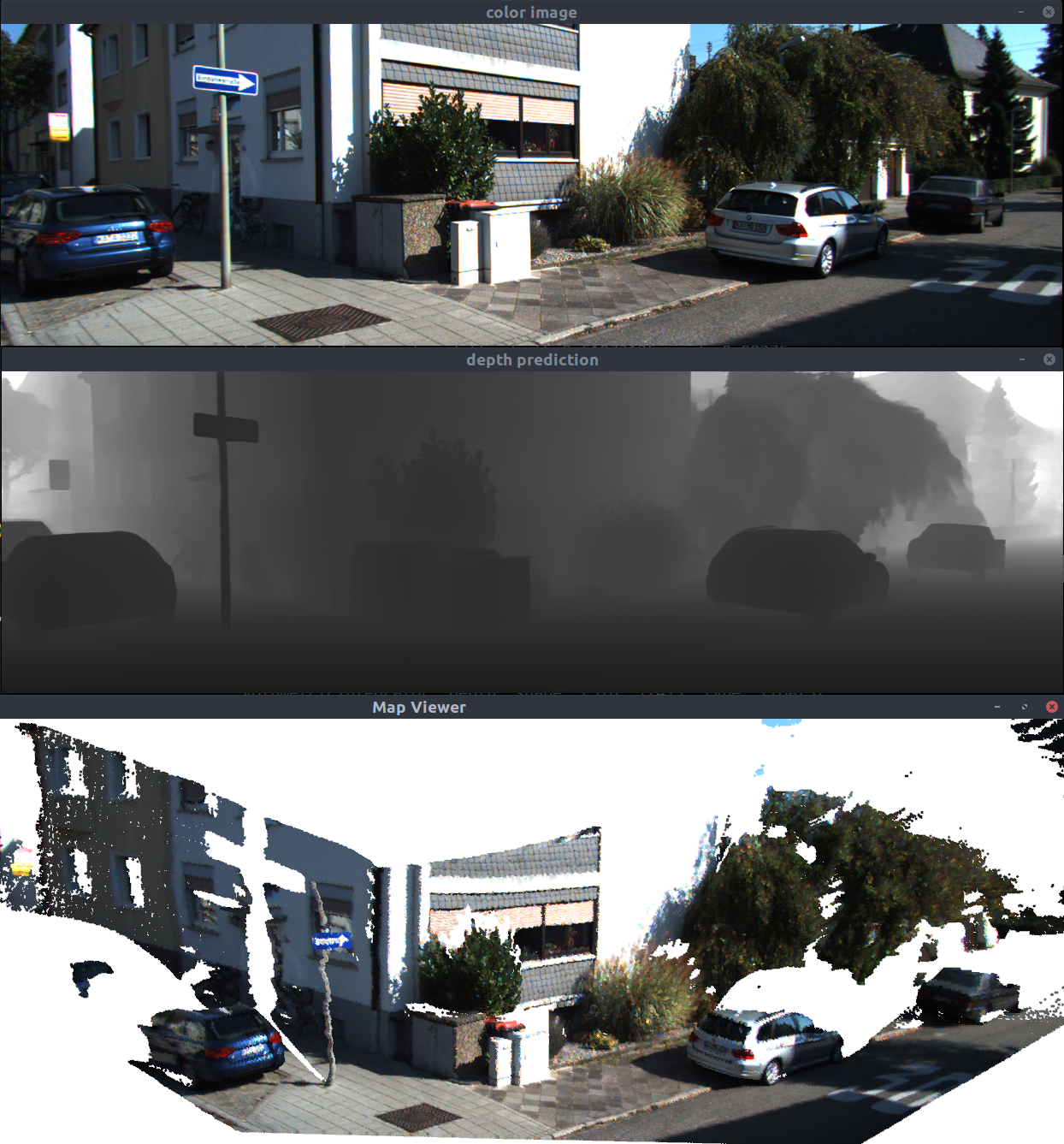
✅ A volumetric pipeline to create dense 3D maps.
✅ Integrated depth prediction models, like DepthPro and DepthAnythingV2.
✅ Map saving and reloading capabilities.
✅ A toolbox packed with new features for Visual Odometry and SLAM.
👉 Check it out: https://github.com/luigifreda/pyslam
Stay tuned – more exciting updates are coming soon!