Deep Reinforcement Learning: from Pong Pixels to a Learned Player
Here you can find a fantastic post on reinforcement learning by Andrej Karpathy. The Author explains how it is possible
Read moreRobotics & Computer Vision Engineer, PhD
Here you can find a fantastic post on reinforcement learning by Andrej Karpathy. The Author explains how it is possible
Read more
University of California, Irvine researchers have invented nanowire-based battery material that can be recharged hundreds of thousands of times. This
Read more
From the webpage of the project “This paper presents a novel probabilistic foundation for volumetric 3-d reconstruction. We formulate the problem as
Read more
A new open-source library has been released by the Robotics and Perception Group of Davide Scaramuzza. Technical details of the
Read more
OpenCV originated at Intel, and is now back at Intel. People wonder about the possibility that OpenCV can stop beeing
Read more
In this work from Georgia Tech, researchers have developed a control algorithm that allows small-scale autonomous cars to drive autonomously around
Read more
Google revealed the TPU (Tensor Processing Unit), a custom ASIC designed and built specifically for machine learning applications.
Read more
“Hyper-Reality (total runtime approx 6 minutes) is a concept film by Keiichi Matsuda. It presents a provocative and kaleidoscopic new
Read more
An interesting work from CMU. A spatiotemporal cost function is defined in order to jointly estimates both the spatiotemporal camera
Read more
Everyone knows about Google Map and use it. But now the internet giant has a bigger target: it wants to digitally map
Read more
You can find on this page a nice overview of the offerings in the 3D camera marketplace. A wide set of
Read more
This video shows how the new RealSense R200 can be used for 2D mapping and navigation for TutleBot. Drivers & ROS
Read more
This video shows an impressive footage of a suborbital rocket launch that climbed to 396,405 feet at speeds as high
Read more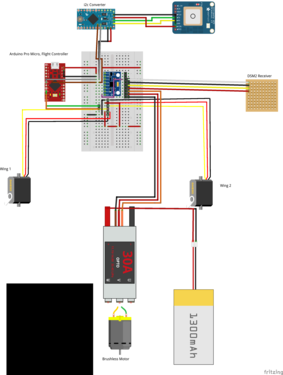
Surfing on the web, you can find tons of tutorial on how to build your own drone. DIY Drones is obviously
Read more