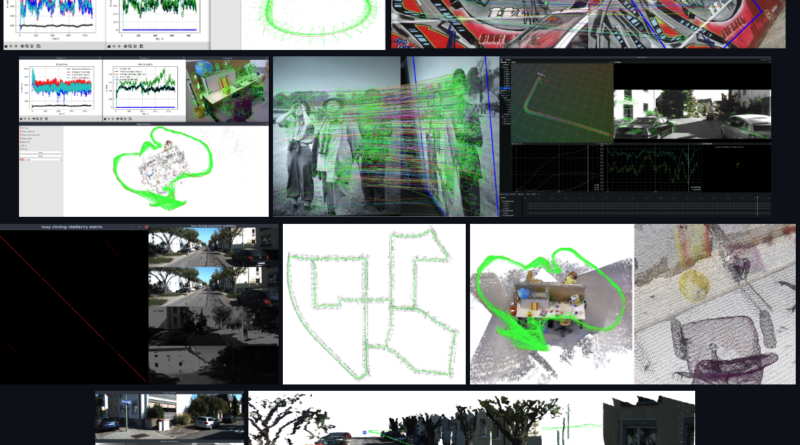
A new release of pySLAM is here. Loop-closing, volumetric integration, depth prediction and more improvements.
🎉 pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
Read moreRobotics & Computer Vision Engineer, PhD
🎉 pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
Read more
I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read more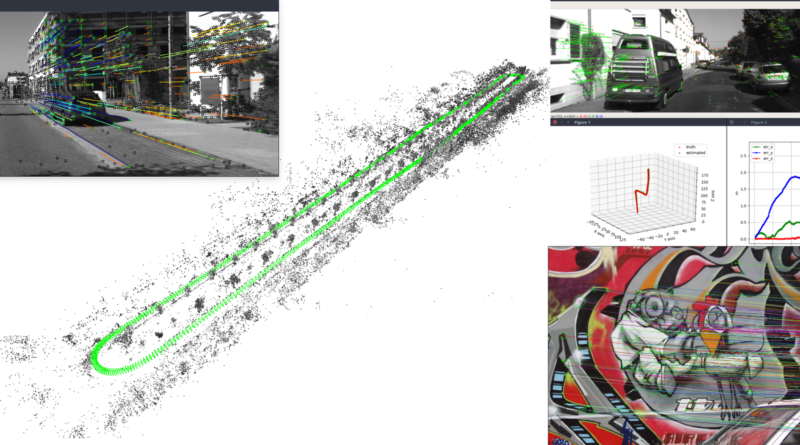
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read more
In this page, the Authors K. Tateno, F. Tombari, I. Laina and N. Navab present the following paper in which CNNs are used
Read more
In this post, Torsten Sattler presents his upcoming CVPR 2017 paper “Comparative Evaluation of Hand-Crafted and Learned Local Features”
Read more
Micheal Milford explains how to make a driverless car see the road ahead. From his Google+ post: “We were asked to
Read more