A new release of pySLAM is here. Loop-closing, volumetric integration, depth prediction and more improvements.
🎉 pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
Read moreRobotics & Computer Vision Engineer, PhD
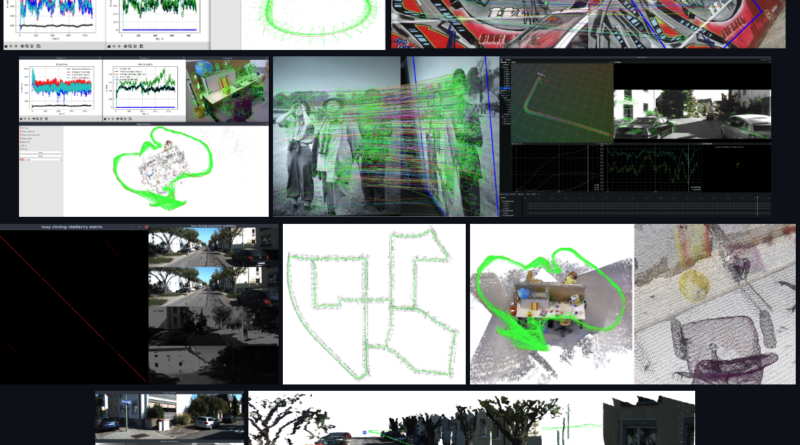
🎉 pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
Read more
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read more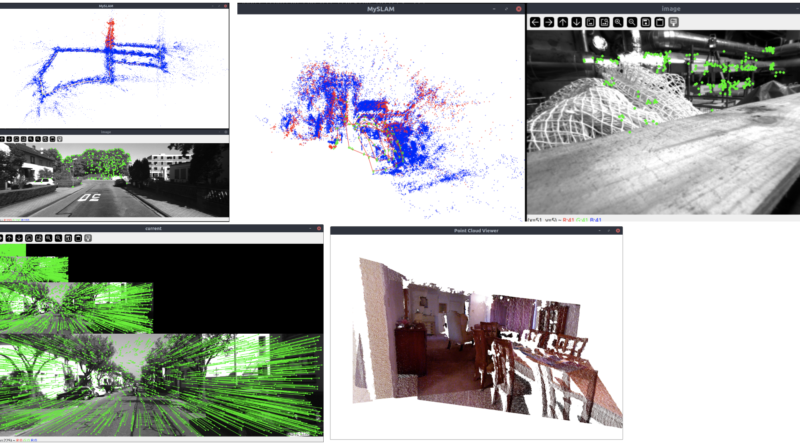
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay. slamplay is a collection of powerful
Read more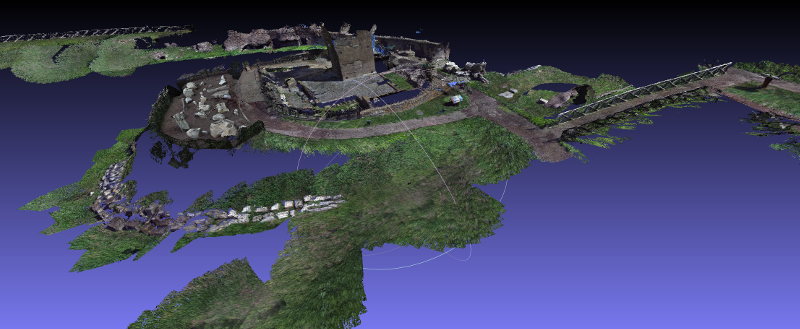
If you are visiting Rome, now you can go to the Circus Maximus and enjoy a great Mixed-Reality experience. An
Read more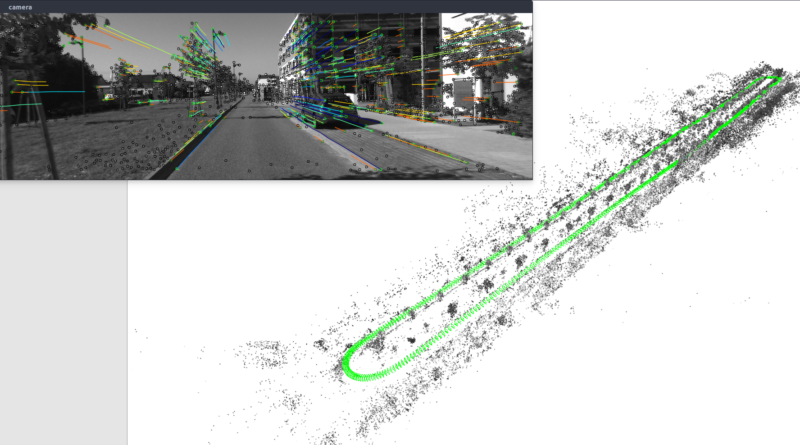
On February 2019, I was the teacher of the course Visual Perception and Spatial Computing in the Advanced School of AI. This school
Read more
Micheal Milford explains how to make a driverless car see the road ahead. From his Google+ post: “We were asked to
Read more
In this post, Alejo Concha Belenguer presents his new work RGBDTAM. This is a direct SLAM pipeline that runs in real-time and
Read more
This post reports that a self-driving Uber car was involved in a high-speed crash in Tempe, Arizona. No one was
Read more
Using Microsoft HoloLens, 24,000+ service technicians of Thyssenkrupp will be able to visualize and identify problems with elevators ahead of
Read more
From Google+, Davide Scaramuzza presents his last work on perception aware path planning for quadrotors. “I am happy to share
Read more
It was a great life experience being part of the TRADR team who successfully deployed two UGVs and three drones
Read more
On this page Dr. Robin Murphy posted very useful recommendations for using ground and aerial robots for immediate lifesaving. “…A video camera,
Read more
Uber is definitely stepping on the accelerator… “Starting later this month, Uber will allow customers in downtown Pittsburgh to summon
Read more
A new exciting work from the Computer Vision Group of TUM. “DSO is a novel direct and sparse formulation for
Read more
“3D sensing has experienced a major progress with the availability of mature technology for scanning large-scale spaces that can reliably
Read more