Software
pySLAM
code: https://github.com/luigifreda/pyslam
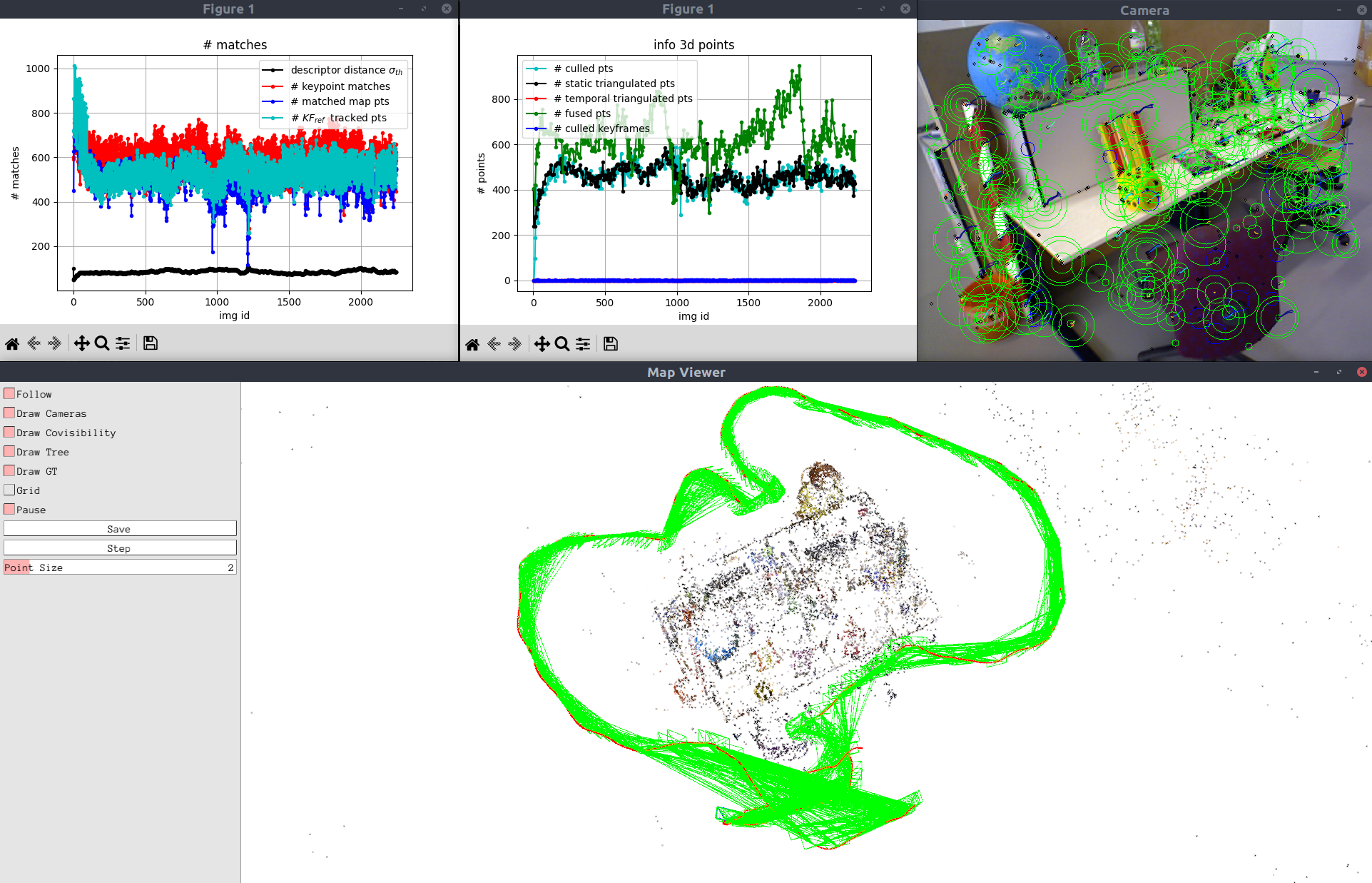
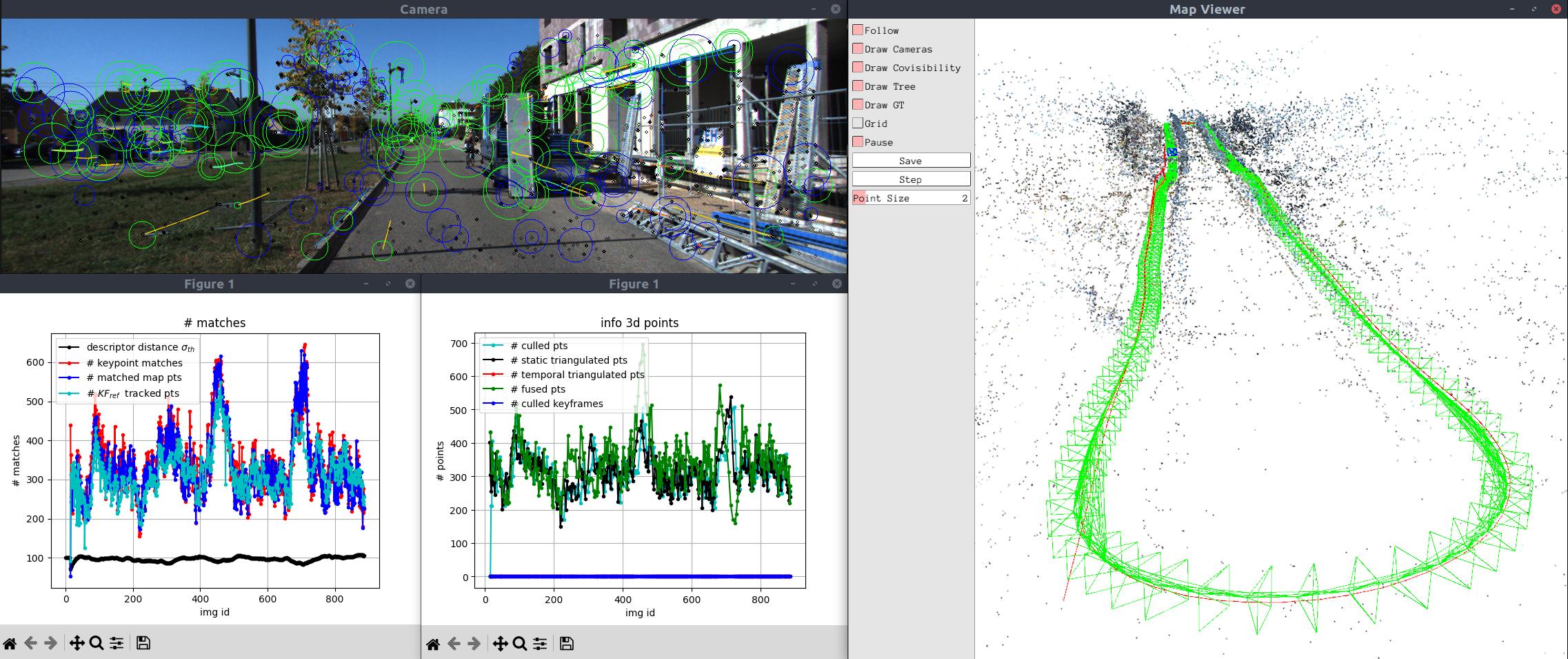
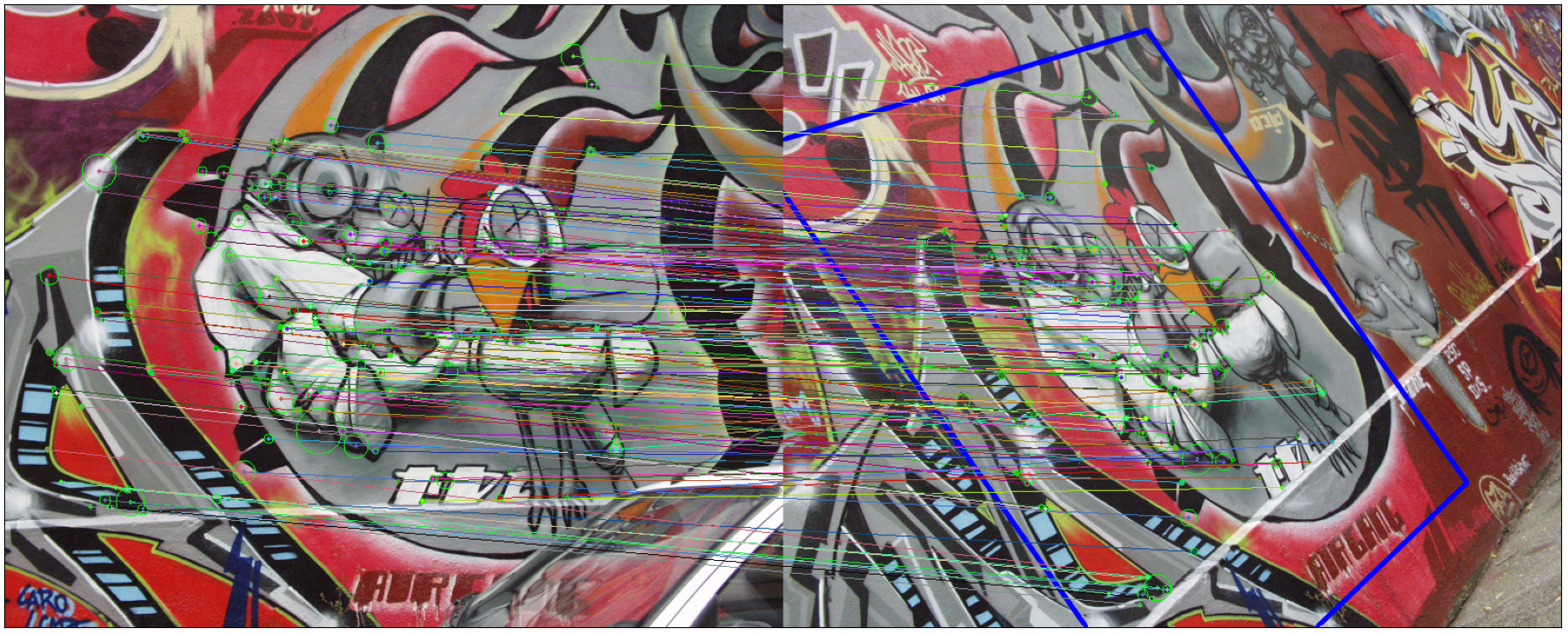
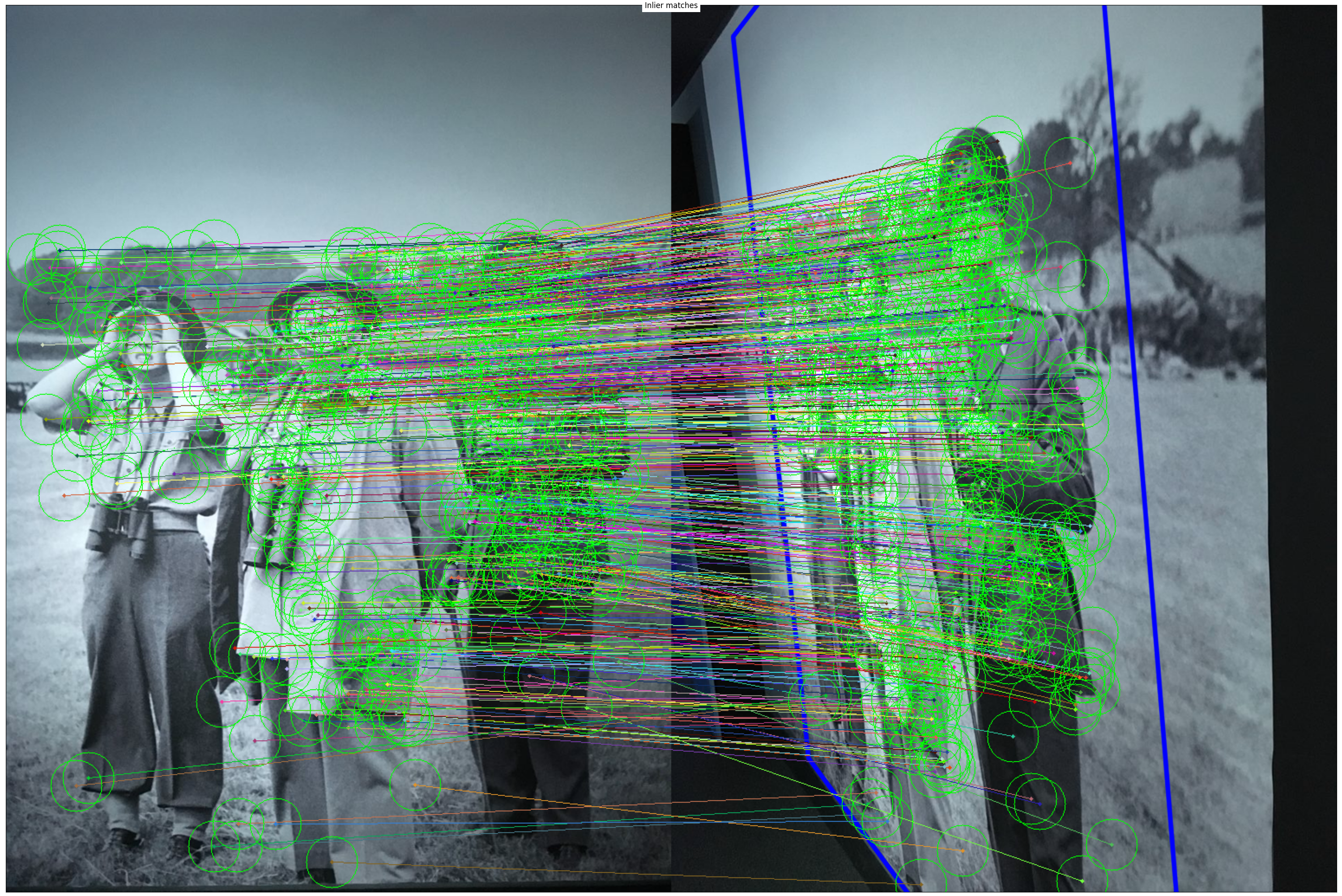
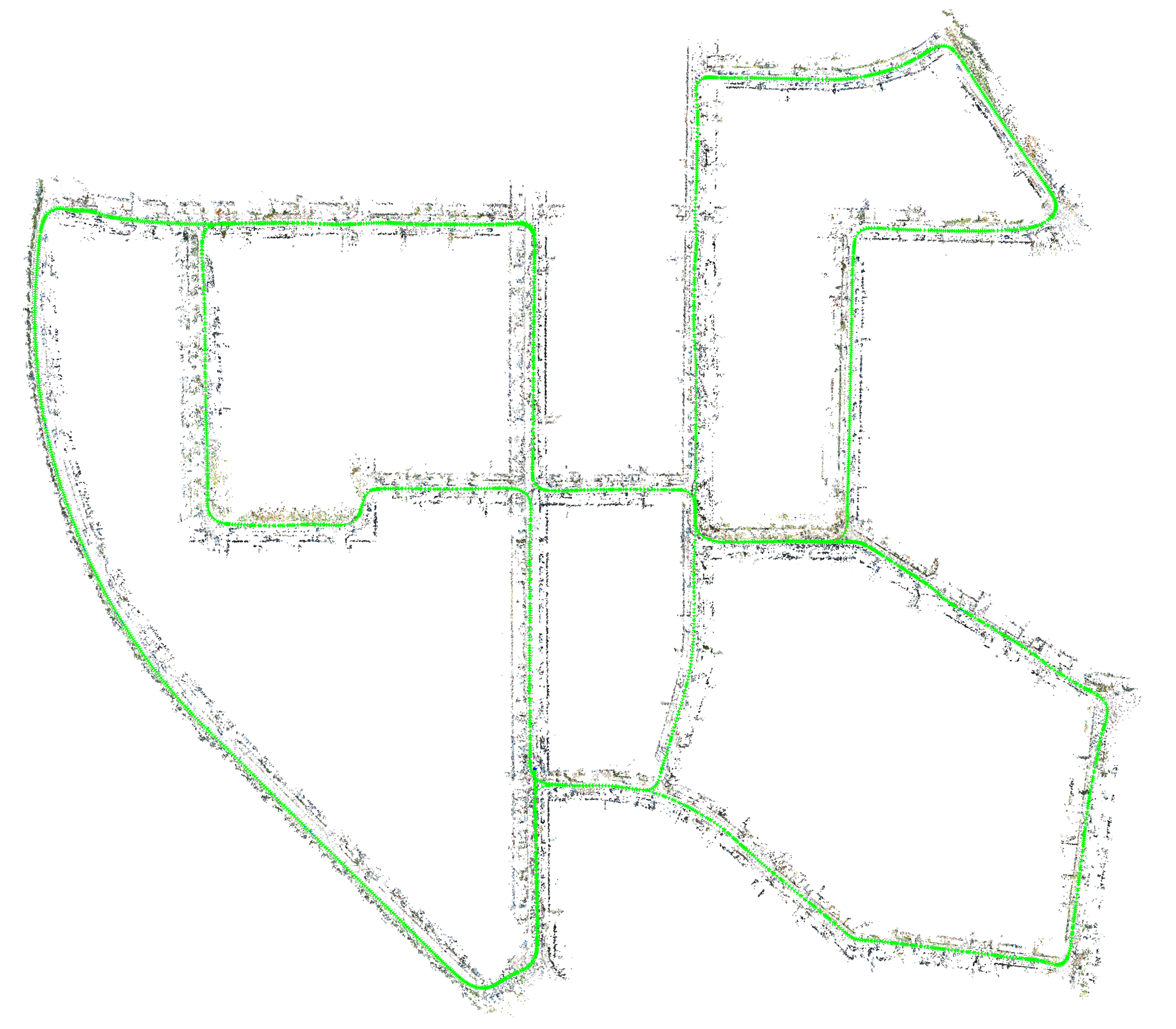
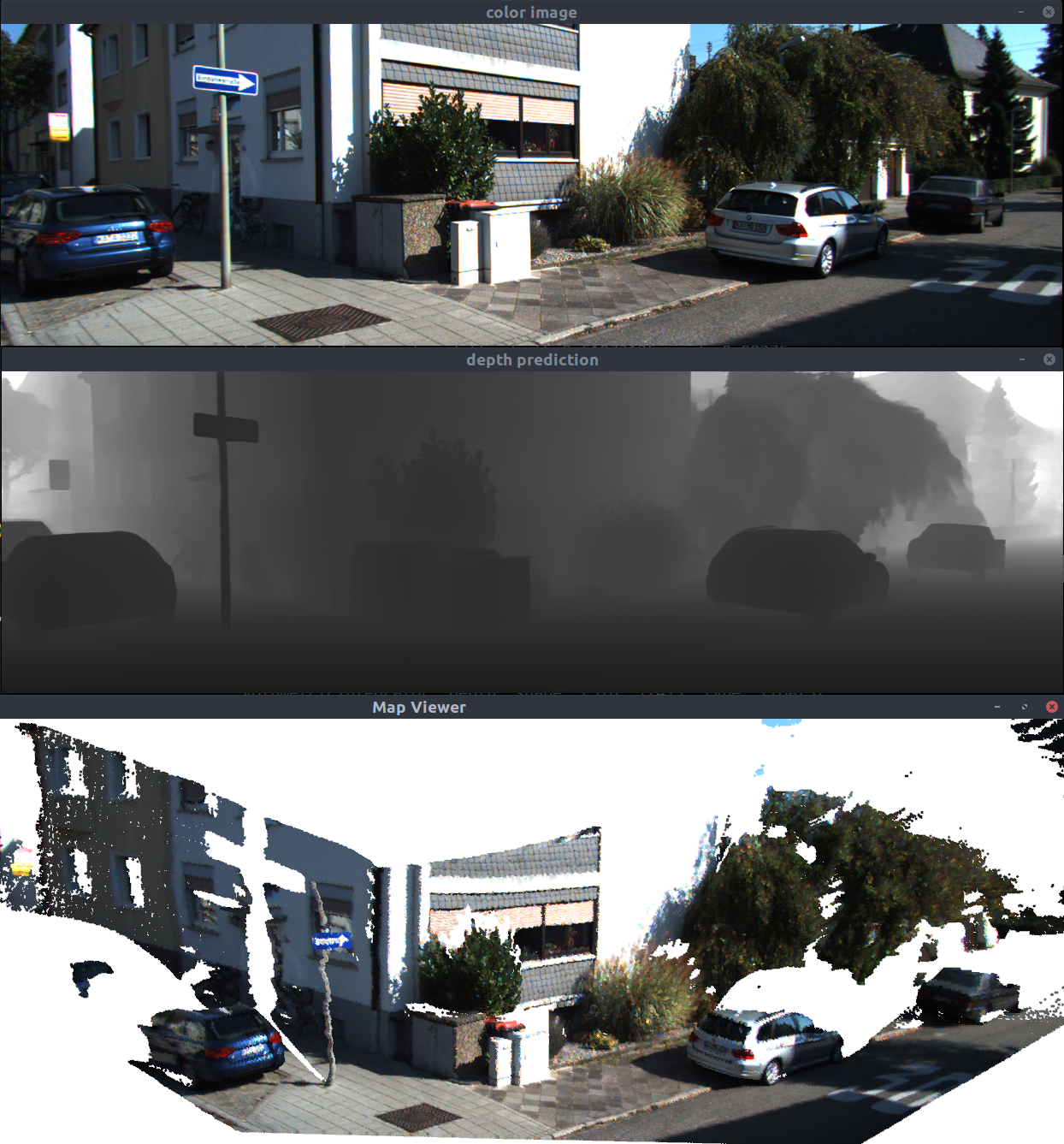
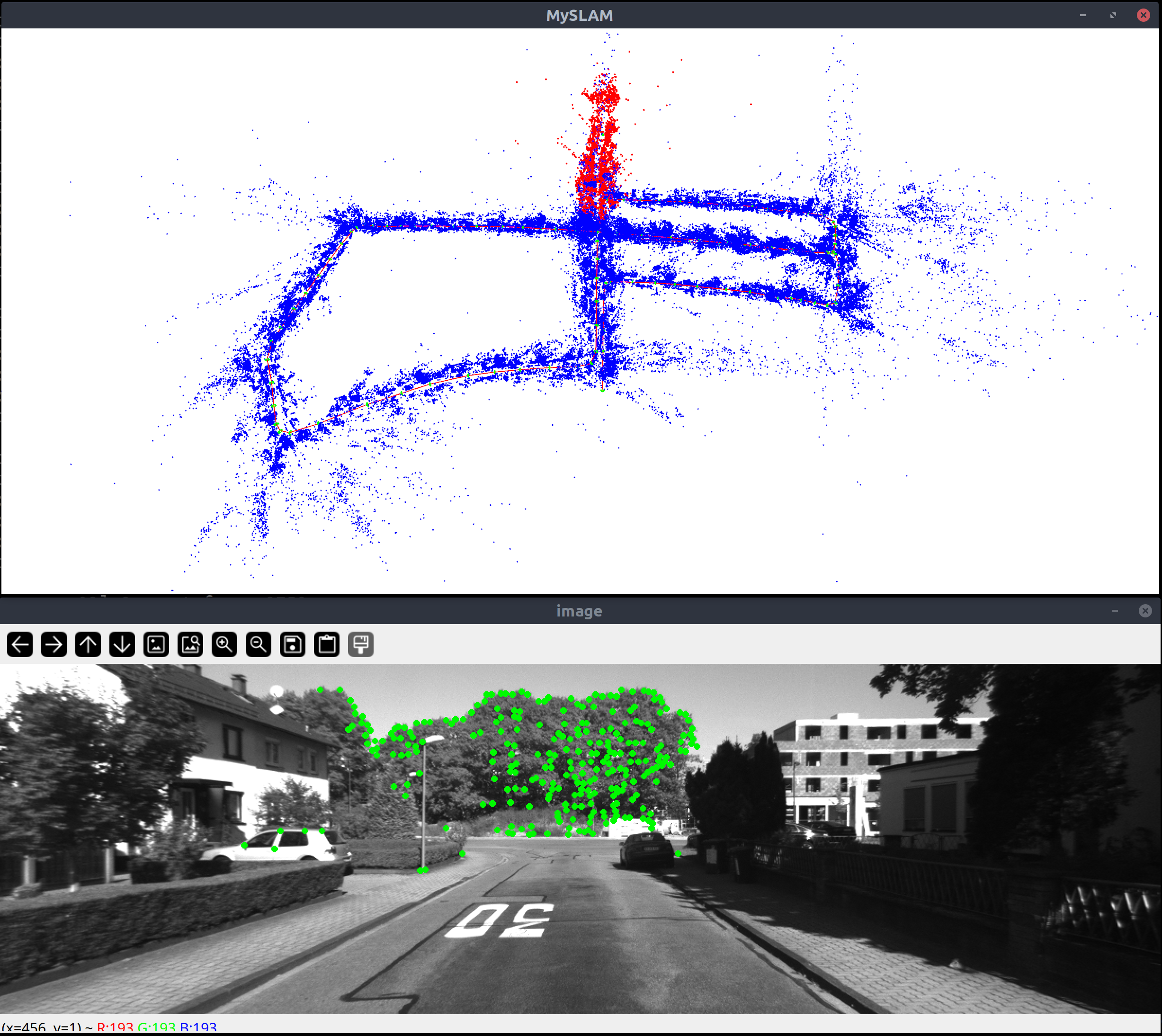
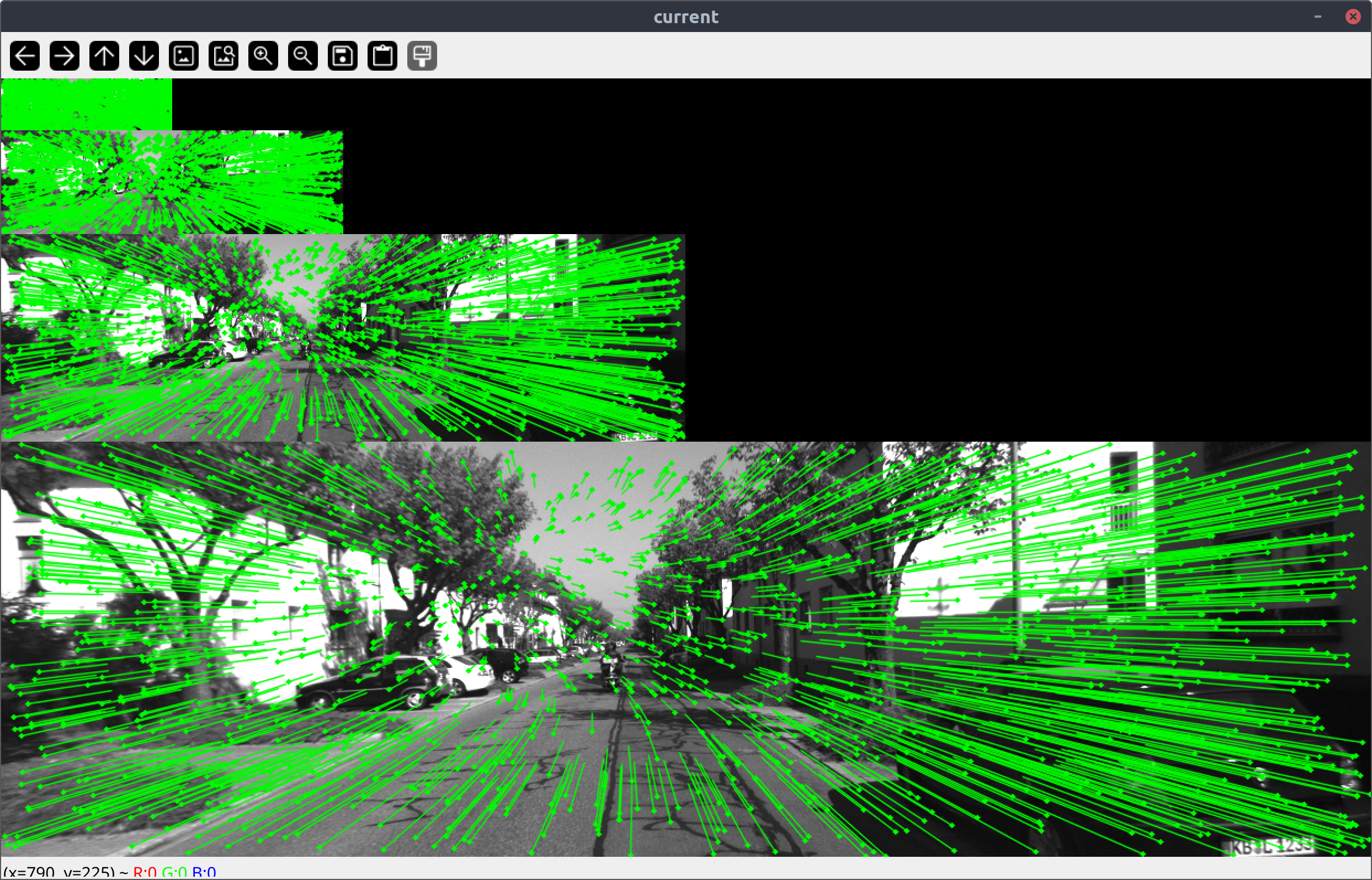
pySLAM is a visual SLAM pipeline in Python for monocular, stereo, and RGBD cameras. It supports many classical and modern local features, descriptor aggregators, global features (image-wise descriptors), different loop-closing methods, a volumetric reconstruction pipeline, and depth prediction models. All the techniques are available in a single Python environment. You can use this framework as a baseline to play with all these SLAM-related techniques and create your own (proof of concept) VO/SLAM pipeline in Python. At present, pySLAM has over 2k stars on GitHub.


PLVS
code: https://github.com/luigifreda/plvs
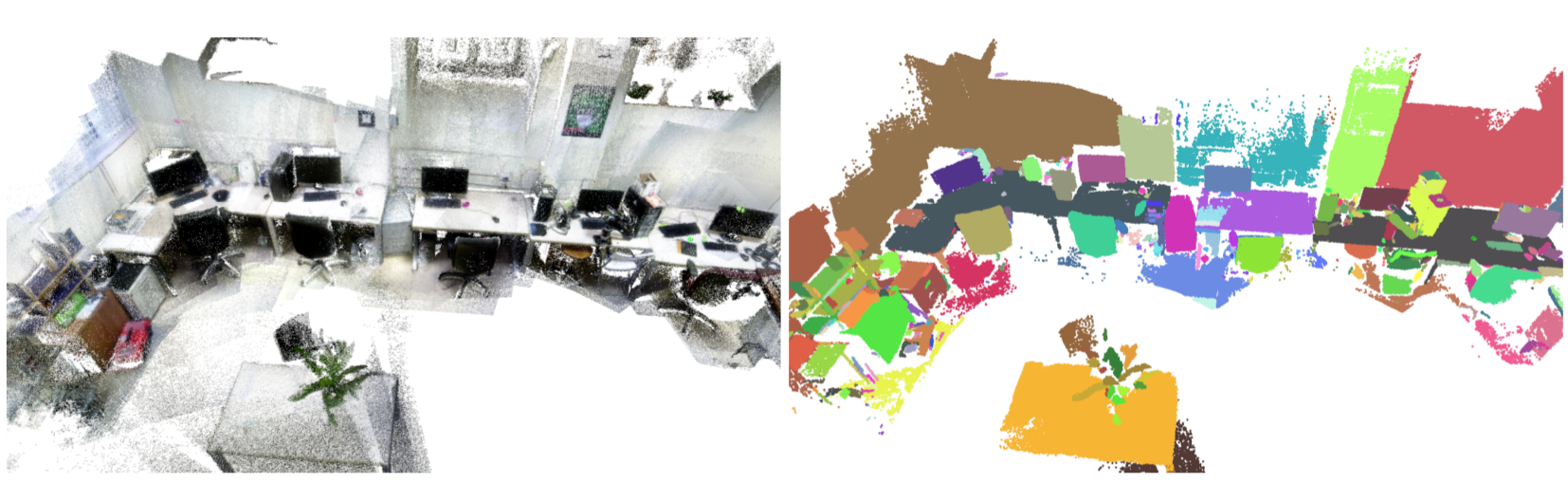
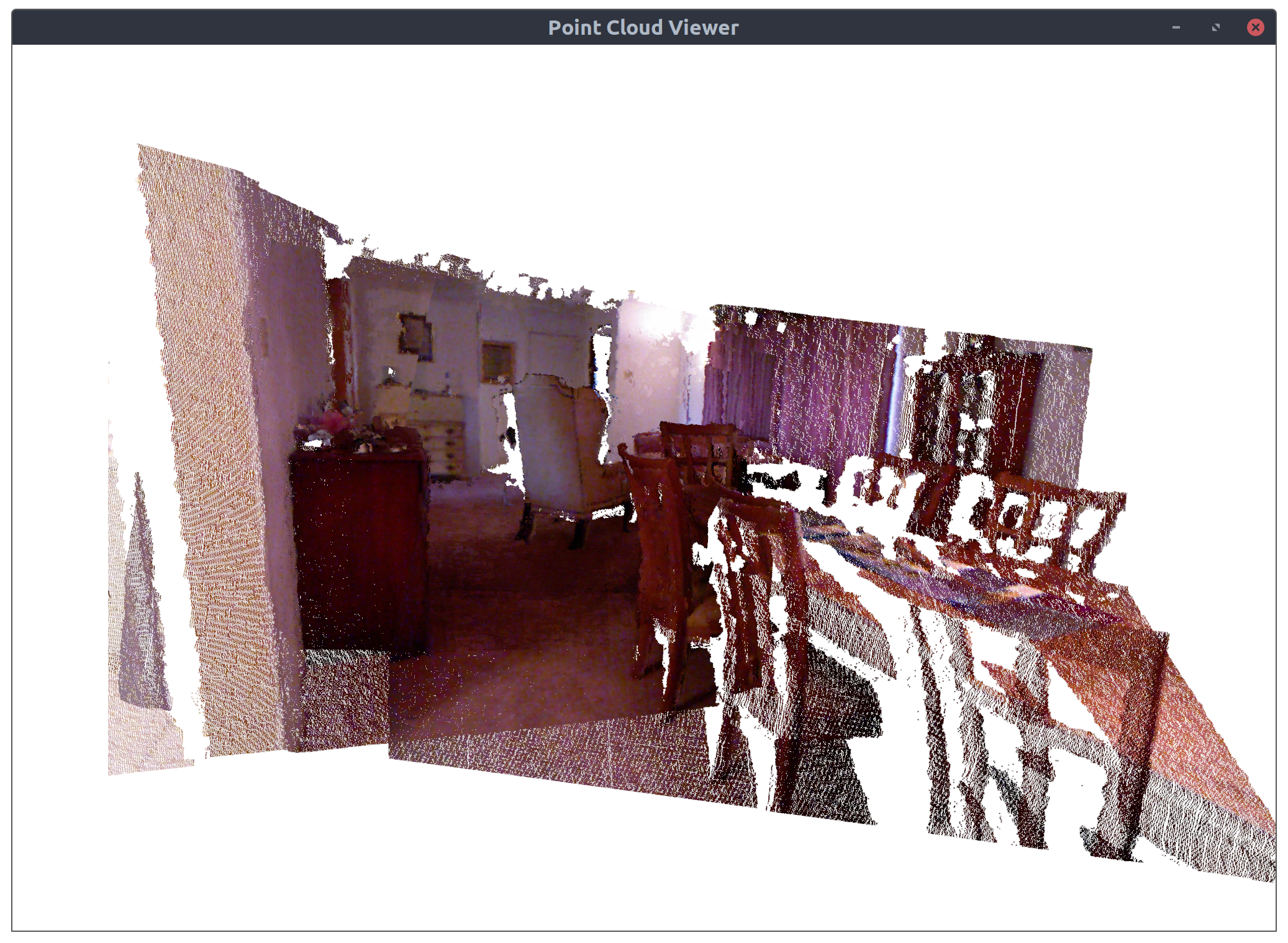
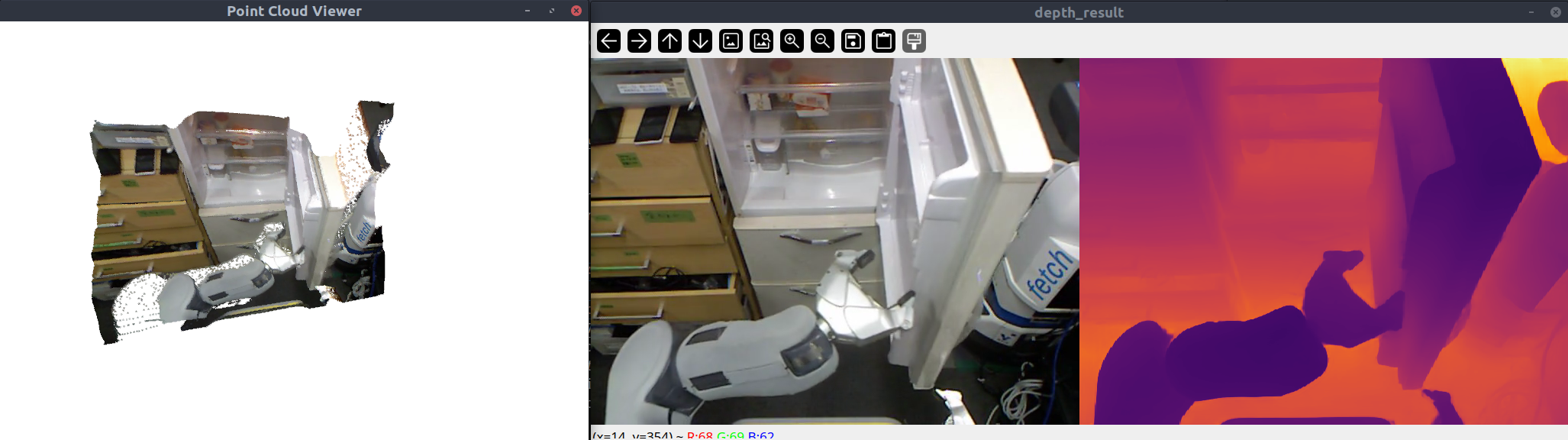
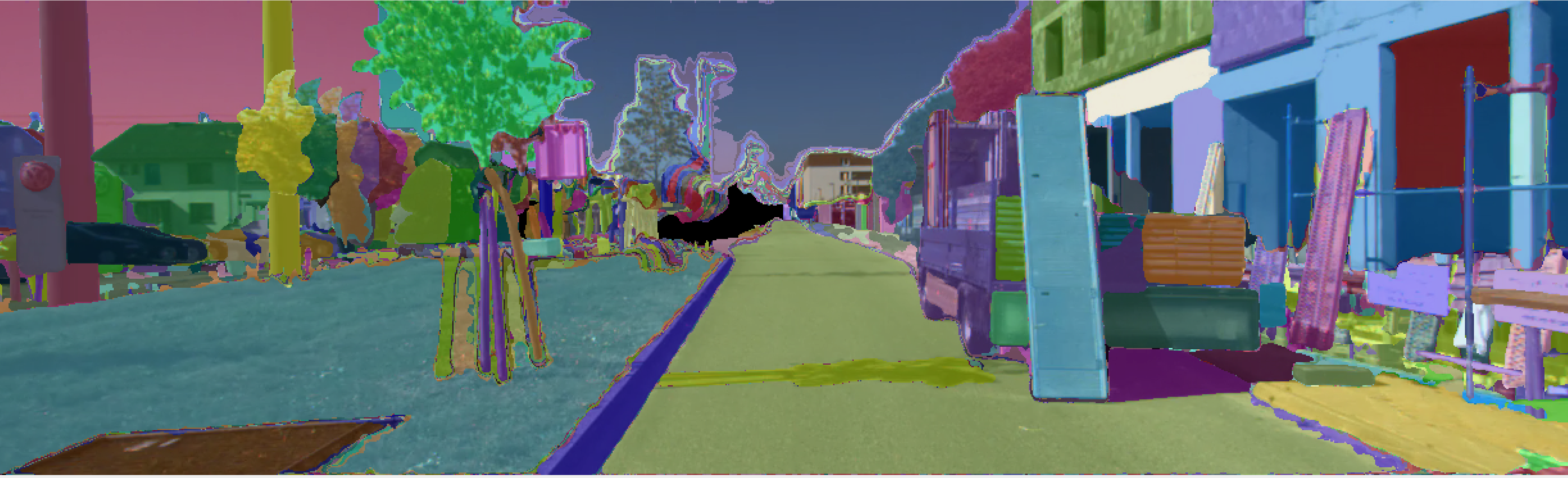
PLVS is a real-time system that leverages sparse SLAM, volumetric mapping, and 3D unsupervised incremental segmentation. PLVS stands for Points, Lines, Volumetric mapping and Segmentation. The system runs entirely on CPU or can profit from available GPU computational resources for some specific tasks. The underlying SLAM module is sparse and keyframe-based. It relies on the extraction and tracking of keypoints and keylines. Different volumetric mapping methods are supported and integrated in PLVS. A novel “reprojection” error is proposed for bundle-adjusting line segments. This error allows the system to better stabilize the position estimates of the mapped line segment endpoints and improves SLAM performances. An incremental segmentation method is implemented and integrated into the PLVS framework. Additionally, maps can be saved and reused at need providing multi-session mapping capabilities. You can find further details on this page or in the following document:
PLVS: A SLAM System with Points, Lines, Volumetric Mapping, and 3D Incremental Segmentation
Luigi Freda

3DMR
code: https://github.com/luigifreda/3dmr
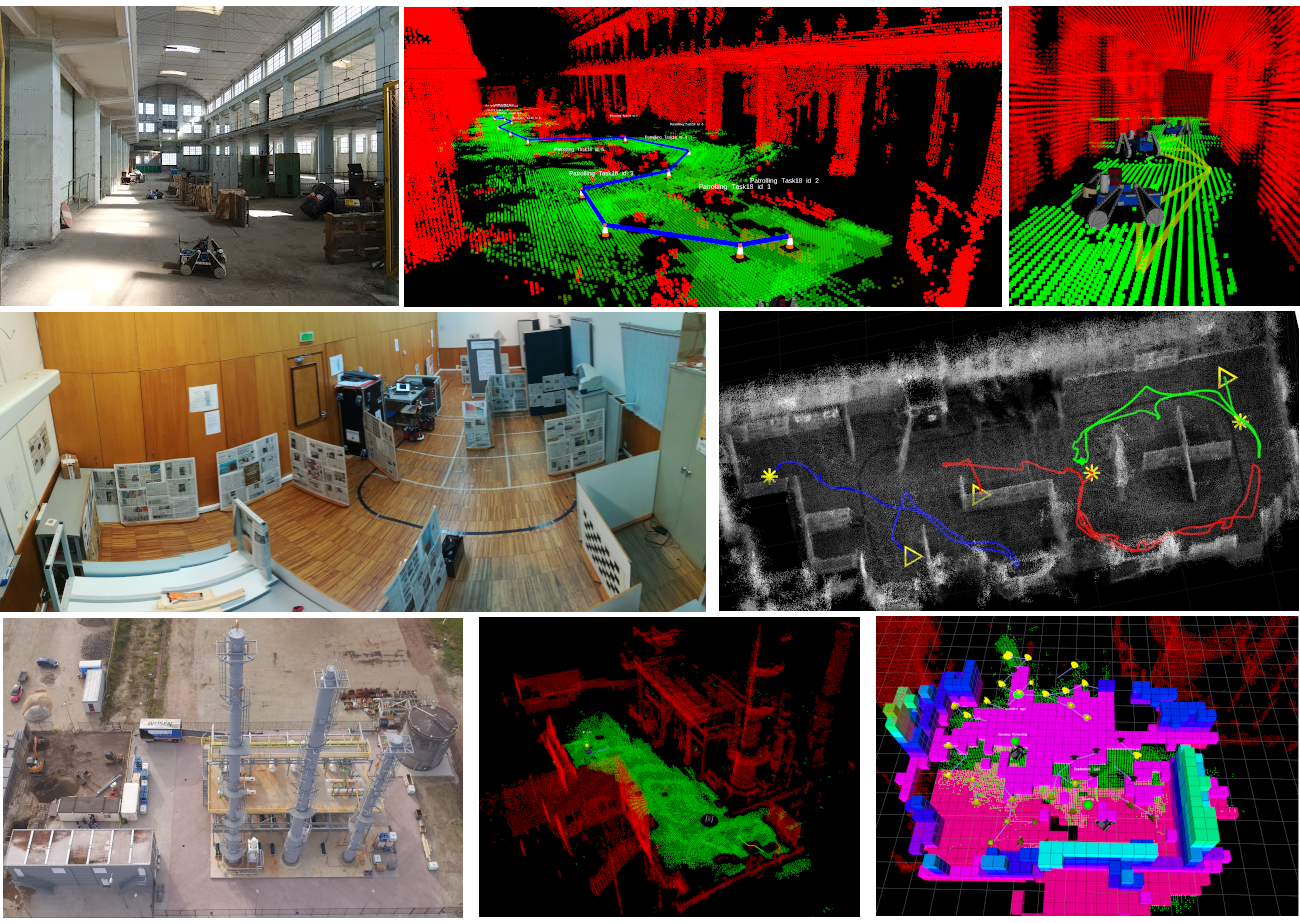
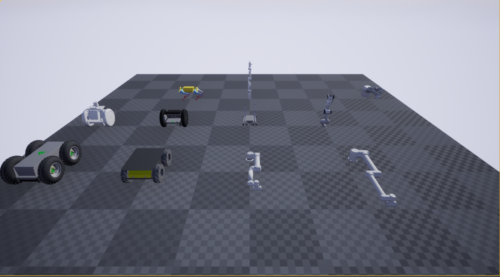
The 3DMR framework provides tools for 3D multi-robot exploration, patrolling, and navigation tasks with different robots under different simulators. It provides the core C++ implementation behind our papers:
3D Multi-Robot Exploration with a Two-Level Coordination Strategy and Prioritization
L. Freda, T. Novo, D. Portugal, R.P. Rocha
3D Multi-Robot Patrolling with a Two-Level Coordination Strategy
L. Freda, M. Gianni, F. Pirri, A. Gawel, R. Dubé, R. Siegwart, C. Cadena
This repository allows testing our proposed multi-robot strategies within V-REP and gazebo. It extends and improves our previous framework 3dpatrolling. Here, you can find a list of new features we added. More information on this page.
slamplay
code: https://github.com/luigifreda/slamplay
slamplay is a collection of powerful tools to start playing and experimenting with SLAM in C++. It installs and makes available in a single cmake framework some of the most important
– back-end frameworks (g2o, gtsam, ceres, se-sync, etc.),
– front-end tools (OpenCV, PCL, etc.),
– algebra and geometry libs (eigen, Sophus, cholmod, etc.),
– viz tools (pangolin, imgui, etc.),
– loop-closure frameworks (DBoW2, DBoW3, iBoW, etc.),
– deep learning models and tools (based on TensorRT, tensorflow_cc, onnx-runtime, etc.),
along with some nice examples to easily and quickly start with all these tools.

3Dpatrolling
code: https://github.com/luigifreda/3dpatrolling
webpage: https://sites.google.com/a/dis.uniroma1.it/3d-cc-patrolling/
This repository provides part of the C++ implementation behind our paper titled “3D Multi-Robot Patrolling with a Two-Level Coordination Strategy“. The software allows testing the proposed multi-robot strategy within a V-REP simulation environment. Further details are available on this page. The above framework 3DMR is now replacing it (by integrating all of the 3Dpatrolling functionalities).
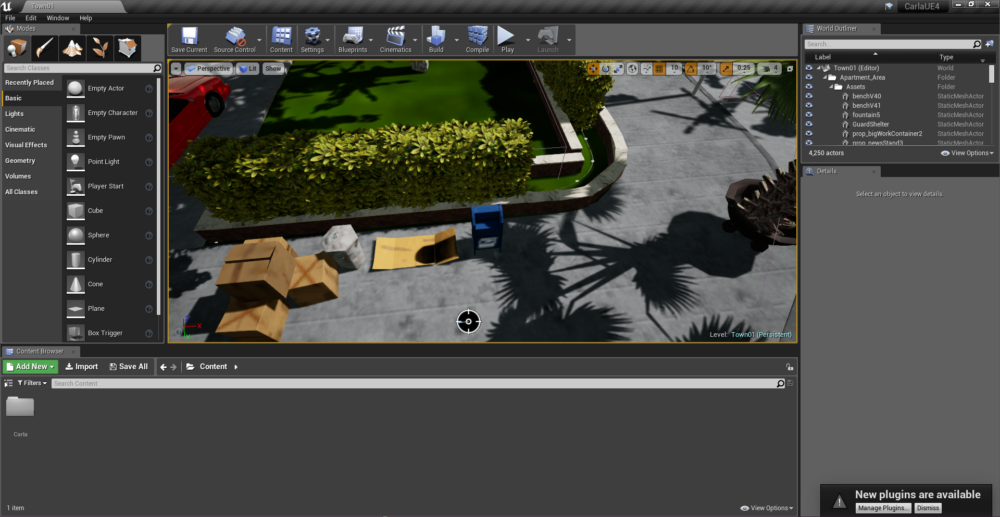
ROSIntegration for Unreal Engine 4.23
code: https://github.com/luigifreda/ROSIntegration (fork)
news: now this fork has been merged into the original repo https://github.com/code-iai/ROSIntegration
I succeeded in porting the ROSIntegration plugin to the brand new version 4.23 of Unreal Engine (UE). The ROSIntegration plugin allows a cool integration between UE and ROS. The plugin was already available and tested up to UE 4.22. Unfortunately, some memory management bugs prevented the plugin from correctly working (getting continuous crashes) under the new version 4.23 (where more strict checks are performed on UObject and memory management). I successfully found and fixed the bugs (in particular, with smart pointers management) in the ROSIntegration plugin. Now, it correctly works without crashes.
rosdocker
code: https://github.com/luigifreda/rosdocker.git
🤖 🐳
The rosdocker repository contains a set of tools that simplify the management of docker containers and (ROS) images with transparent support of NVIDIA drivers. You can play with it to create your custom docker containers, smoothly open many terminals connected to them, and move from one container to another.
tensorflow_cc
code: https://github.com/luigifreda/tensorflow_cc.git
![]()
This project allows to build and easily access (via cmake) the TensorFlow C++ API. In particular, after having built and deployed your new tensor_cc library, you won’t need Bazel build system anymore (if you wish).
This project started as a fork of another repository. After having hit and solved some build and deployment issues (especially with newer TensorFlow configurations), I am sharing the updated and improved version of the scripts I obtained.