RSS 2025 Workshop: Unifying Visual SLAM – From Fragmented Datasets to Scalable, Real-World Solutions
Excited to share Prof. Michael Milford’s post about the upcoming “Unifying Visual SLAM: From Fragmented Datasets to Scalable, Real-World Solutions”
Read more
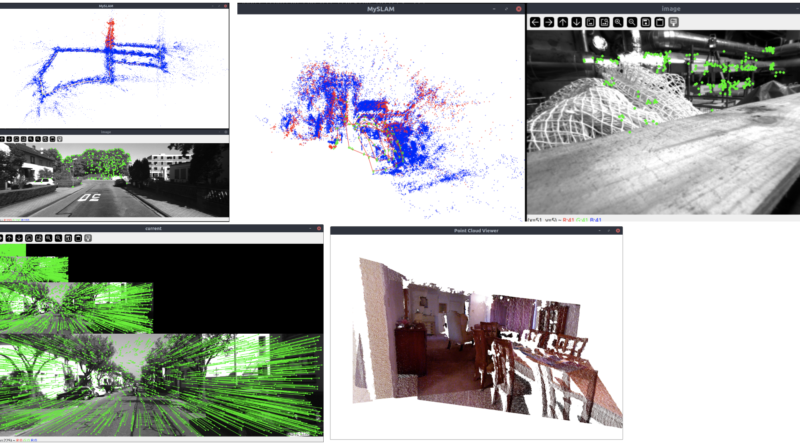
 pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with: