A new release of pySLAM is here. Loop-closing, volumetric integration, depth prediction and more improvements.
🎉 pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
Read moreRobotics & Computer Vision Engineer, PhD
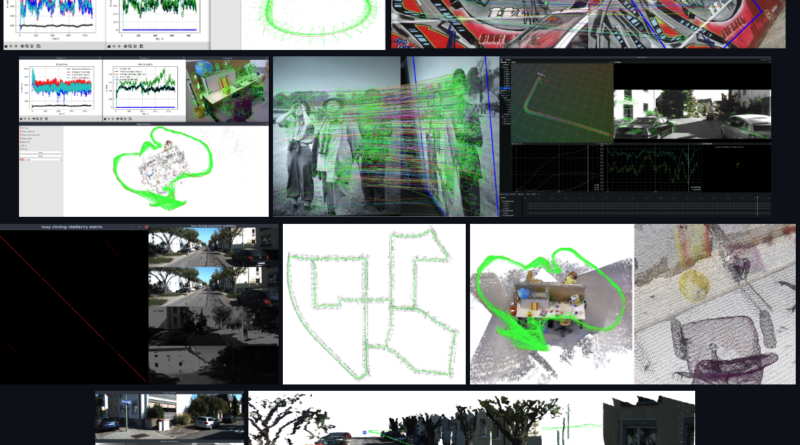
🎉 pySLAM v2.2.5 is here! This new release includes a visual SLAM pipeline for monocular, stereo, and RGBD cameras with:
Read more
I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read more
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read more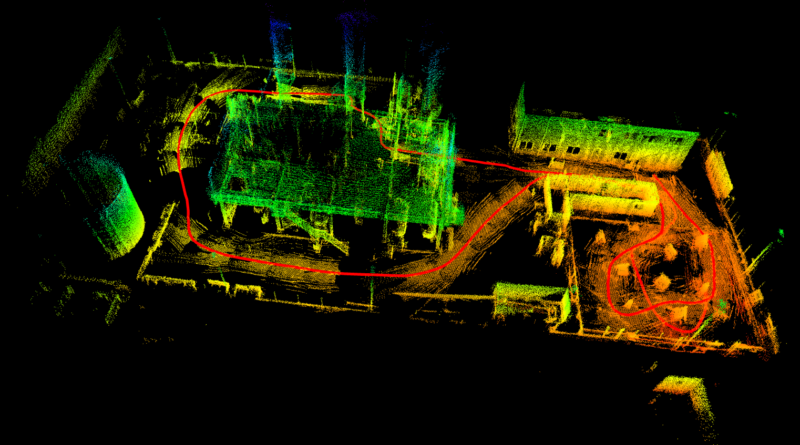
From November 6th to November 17th, I took part to the fourth TRADR Evaluation Exercise in Rotterdam. The full TRADR system was evaluated by the GB firefighters end-users
Read more
Micheal Milford explains how to make a driverless car see the road ahead. From his Google+ post: “We were asked to
Read more
This post reports that a self-driving Uber car was involved in a high-speed crash in Tempe, Arizona. No one was
Read more
According to this post, Sebastian Thrun said “Uber has just bought a half-a-year-old company [Otto] with 70 employees for almost $700
Read more
Uber is definitely stepping on the accelerator… “Starting later this month, Uber will allow customers in downtown Pittsburgh to summon
Read more