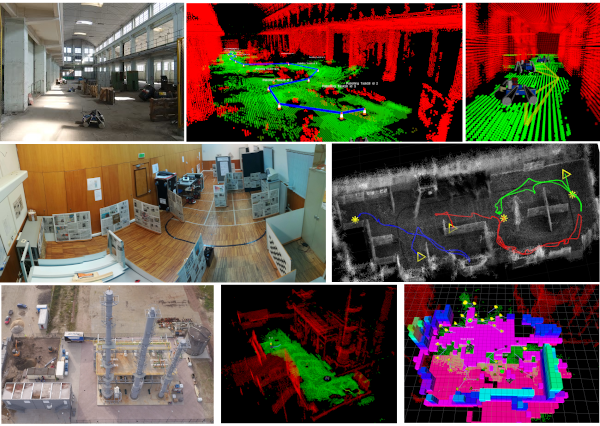
3DMR – 3D Multi-Robot Exploration with a Two-Level Coordination Strategy and Prioritization
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read moreRobotics & Computer Vision Engineer, PhD
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read more
I’m very pleased to serve as a member of the Program Committee of the IRMAS – Intelligent Robotics and Multi-Agent
Read more
I am very excited to release the paper 3D Multi-Robot Patrolling with a Two-Level Coordination Strategy (just appeared in Autonomous Robots) and
Read more
On November 17 2017, I was a member of the crew who organized the TRADR Technology Day. More than 60
Read more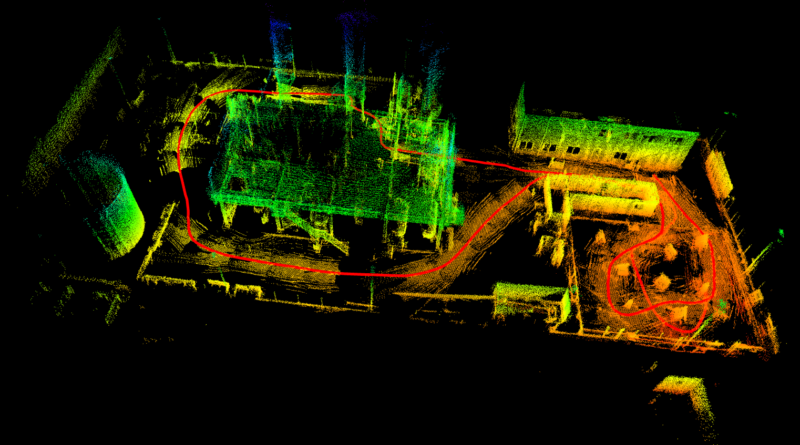
From November 6th to November 17th, I took part to the fourth TRADR Evaluation Exercise in Rotterdam. The full TRADR system was evaluated by the GB firefighters end-users
Read more
On September 17 2017, I was with the Alcor and TRADR teams in Piombino, for the European Robotics League event. We gave
Read more
The TRADR EU project is on Euronews. The video report shows the simulated disaster scene we used in the last
Read more
This year, the TRADR review took place at the Scuola Di Formazione Operativa of Vigili del Fuoco (Italian Firefighters) in
Read more
Our recent work with ETHZ was awarded Best Late Breaking Report at SSRR 2016 “3D Localization, Mapping and Path Planning for
Read more
Uber is definitely stepping on the accelerator… “Starting later this month, Uber will allow customers in downtown Pittsburgh to summon
Read more
From July 4th to July 8th, I participated to the third TRADR Joint Exercise which took place in Prague (Czech Republic). The full
Read more
A new open-source library has been released by the Robotics and Perception Group of Davide Scaramuzza. Technical details of the
Read more
In this work from Georgia Tech, researchers have developed a control algorithm that allows small-scale autonomous cars to drive autonomously around
Read more
This video shows how the new RealSense R200 can be used for 2D mapping and navigation for TutleBot. Drivers & ROS
Read moreExploration of Unknown Environments with Robot Manipulators This work presents a method for sensor-based exploration of unknown environments by
Read more